本文简要描述在Pro/E中盘形凸轮和圆柱凸轮的参数化建模,以及用Pro/E的运动学分析模块Mechanism仿真的过程。
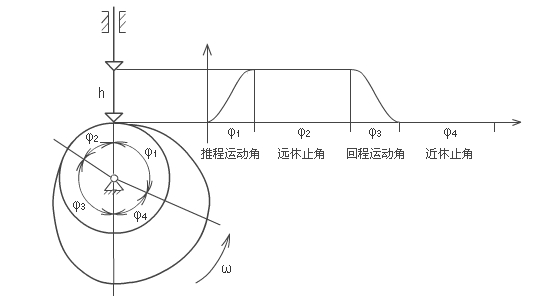
一般来说,凸轮机构主动件作等速转动,直接推动从动件(推杆)作直线往复运动。根据推杆位置,凸轮的轮廓划分为四部分,其对应的凸轮转角分别称为推程运动角、远休止角、回程运动角和近休止角。下图为各角度与推杆位置的对应关系。
Pro/E盘形凸轮建模、仿真过程为:
1. 盘形凸轮建模
a. 添加盘形凸轮参数
| 参数 | 值 | 名称 |
|---|---|---|
| baser | 50 | 基圆半径 |
| h | 15 | 推程 |
| phi1 | 90 | 推程运动角 |
| phi2 | 90 | 远休止角 |
| phi3 | 90 | 回程运动角 |
| phi4 | 90 | 近休止角 |
亦可添加凸轮厚度、转轴孔径等其他参数。
b. 绘制凸轮轮廓曲线
使用笛卡尔坐标下的方程形式,按推程运动角、远休止角、回程运动角和近休止角对应划分四段,绘制凸轮轮廓曲线(以推杆余弦加速度运动规律为例)。四段曲线具体方程式详见文章:常用推杆运动规律的Pro/E曲线方程式。
c. 提取轮廓曲线,拉伸成为凸轮
2. 推杆和支架建模
支架用来安装凸轮和推杆,组合成为凸轮机构。
3. 建立组件/装配体
使用“缺省”约束装入支架,使用“销钉”约束装入凸轮,使用“滑动杆”约束装入推杆,并建立推杆与凸轮之间的“槽”约束。此处使用的各种连接方式的约束关系详见文章:Pro/E装配连接约束及相对运动关系。
4. 仿真
a. 进入应用程序“机构”模块
b. 添加伺服电动机
在凸轮“销钉”约束的转轴处添加伺服电动机,设置角速度为36deg/sec。
c. 机构分析
分析类型选择“动态”,此模式下可以测量速度和加速度,持续时间设置为10sec,使凸轮完成整一圈转动。

d. 测量结果
推杆位置图像
推杆速度图像
推杆加速度图像
5. 圆柱凸轮建模
a. 添加圆柱凸轮参数
| 参数 | 值 | 名称 |
|---|---|---|
| bottomr | 50 | 圆柱底圆半径 |
| baseh | 70 | 圆柱基高 |
| h | 15 | 推程 |
| phi1 | 90 | 推程运动角 |
| phi2 | 90 | 远休止角 |
| phi3 | 90 | 回程运动角 |
| phi4 | 90 | 近休止角 |
b. 绘制凸轮轮廓曲线
不同于盘形凸轮,这里使用圆柱坐标系(以推杆余弦加速度运动规律为例):
/* 推程r=bottomrtheta=t*phi1z=baseh+h*(1-cos(180*t))/2/* 远休止r=bottomrtheta=phi1+phi2*tz=baseh+h/* 近休止r=bottomrtheta=phi1+phi2+phi3*tz=baseh+h*(1+cos(180*t))/2/* 回程r=bottomrtheta=phi1+phi2+phi3+phi4*tz=basehc. 提取轮廓曲线,在FRONT面草绘一个底圆
d. 使用可变剖面扫描作4段圆柱体