可以用作机器人腿部的机构有埃万斯连杆机构、切比雪夫连杆机构等,这里简要描述基于切比雪夫连杆机构的机器人腿部设计及其运动仿真。
如下运动简图左侧,由静止节、原动节、从动节、中间节和延长中间节组成的四杆机构即为切比雪夫连杆机构,实现机器人腿部的抬腿、迈步、蹬地、前行的周期性动作。其余未标注名称的杆件与部分切比雪夫连杆组成平行四边形机构,用来保持机器人脚面与地面的平行。
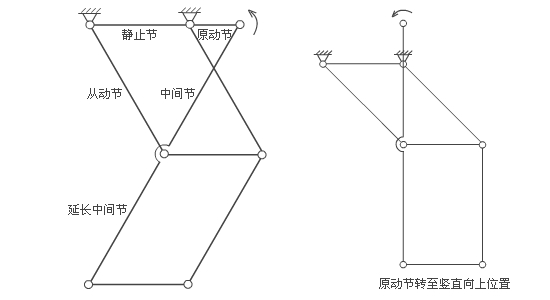
其中,切比雪夫连杆机构各杆件的长度比须符合:
静止节 : 原动节 : 从动节 : 中间节 : 延长中间节 = 2 : 1 : 2.5 : 2.5 : 2.5
使用Pro/E软件建模,并对机器人腿部步态做运动仿真:
机器人腿部位置如下图所示,上半部分为水平方向位置,下半部分为竖直方向位置:
参考:坂本范行. 双足步行机器人DIY. 科学出版社. 2010