双足机器人步行时,左右脚交替地落地支撑,形成一个不断移动和变化的支撑面,如果在行走过程中,整个机器人的重心在地面上的投影点始终保持在支撑面内,就可以保证机器人不绕其支撑脚边缘倾覆。
另外,双足稳定步行还需保证处于支撑状态的脚与地面相对瞬时静止,使机器人在步行过程中不至发生侧向滑动。
一般的解决办法是用陀螺仪测得重心偏差,反馈给舵机调整步态。
而本文提出一种巧妙的机器人脚部结构设计,可实现如下功能:
- 自动调节机器人重心
- 缓减脚部着地冲击
- 增加摩擦,防止侧滑
具体结构如下图示,两根受力接触杆为半椭圆形,在脚后跟处分别与等臂杠杆两端铰接,等臂杠杆与中间支架铰接,两接触杆铰链处与脚底板之间安装弹簧。
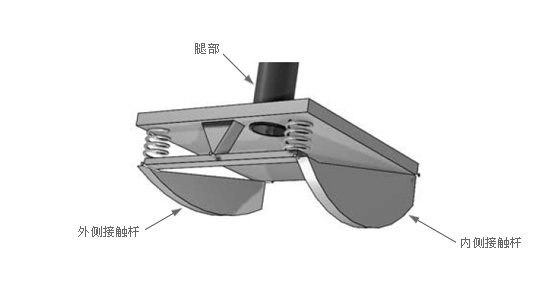
身体外侧的接触杆椭圆半径比内侧大,其高度低于内侧,故而落地支撑下压时机器人身体向外侧倾斜。这样在双足机器人步行时,左右脚交替落地支撑,可以调整身体左右摆动,调整重心。
两根弹簧构成的柔软后跟可以减缓脚部着地冲击带来的不稳定性。
接触杆有橡胶涂层,增加脚部与地面摩擦力,防止机器人单脚支撑时侧滑。
双足机器人步行体态和重心路径见下面示意图:

参考:Steven H. Collins. A Three-Dimensional Passive-Dynamic Walking Robot with Two Legs and Knees