蛇形机器人是仿生机器人家族中的一员,具有生物蛇的运动机理和行为方式,适应各种地形,并可攀爬障碍物,在许多领域具有广泛应用前景。
蛇靠身体的变形与地面作用产生驱动力,最典型的运动方式为S形蜿蜒运动,即借助身体侧面接触凸凹不平的地面从而产生前进力,这种运动方式普遍而高效。
东京工业大学机器人实验室研制了一种两栖蛇形机器人ACM-R5,它不仅能在陆地爬行,还能在水中游动。
ACM-R5采用模块化设计,所有关节结构相同,不仅节约设计和加工成本,而且便于维护。
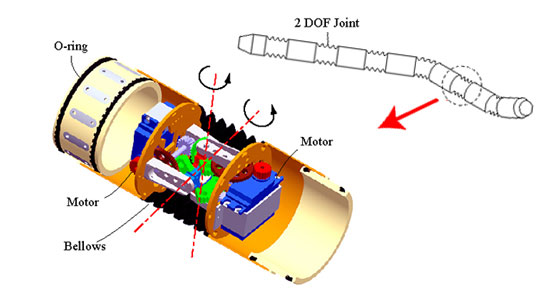
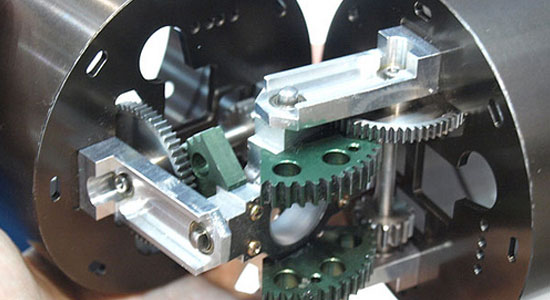
ACM-R5的关节设计巧妙,每个关节有两个自由度,由两个伺服电机带动十字转轴上的齿轮来转动。关节由伸缩膜覆盖来防水,关节连接处用O型圈密封,具体机械结构如下图示: