自然界中的生物行为总有一定的随机性,如下图在瓶中的小虫被外部烛光吸引的情形。小虫总会朝有光的方向飞行,即便瓶口是打开的,小虫也一直被困在瓶中。然而,某些小虫的飞行行为具有随机性,它们就会有机会从瓶口飞出逃走。
模仿小虫的飞行,在机器小车的行动中增加一些随机性,使其获得同样的生存优势。这样,当机器小车在追踪光线途中被玻璃等遮挡卡住时,可以逃脱。
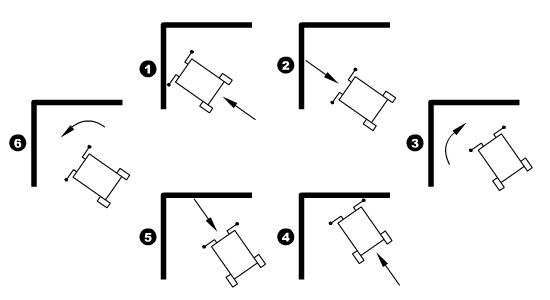
if(sensor(LEFT_TOUCH)) { backward(); sleep(.25); right(); if(random(4)==0) { /* 转弯延时0.5到1.49秒 */ sleep((float)random(100)/100.+.5); } else { sleep(.4) }}机器小车在运动过程中可能遇到的另一情形是陷入某种循环动作,而不是简单的卡住不动。例如下图,小车向墙角运动,当其左侧接触传感器碰到左侧面墙后(图1),它将后退(图2)并向右转弯(图3),在转弯后前进时右侧接触传感器又碰到右侧面墙(图4),然后小车又后退(图5)并向左转弯(图6),此时小车又回到状态1,重新开始这个过程,如此循环不止。
除了借鉴动物行为增加随机性运动外,还可以给机器小车增加运动状态检测功能,找出无用的循环状态,然后启动避障功能。
具体地,给程序增加两个参数,一个是碰撞计数器,用于记录连续的碰撞次数;另一个是计时器,用来判断碰撞是否为短时间内连续发生。当程序检测到连续发生5次碰撞,则判断很可能陷入墙角循环,启动避障程序。主程序如下:
int LEFT_TOUCH=10;int RIGHT_TOUCH=11;
void main() { int recent_bumps=0; reset_timer();
while(1) { forward(); if(sensor(LEFT_TOUCH)) { if(timer()<2.) { if(recent_bumps==5) { random_avoid(); reset_timer(); recent_bumps=0; } else { left_avoid(); reset_timer(); recent_bumps++; } } else { left_avoid(); reset_timer(); recent_bumps=1; } }
if(sensor(RIGHT_TOUCH)) { if(timer()<2.) { if(recent_bumps==5) { random_avoid(); reset_timer(); recent_bumps=0; } else { right_avoid(); reset_timer(); recent_bumps++; } } else { right_avoid(); reset_timer(); recent_bumps=1; } } }}其中,函数reset_timer()的功能是将计时器复位,函数timer()则返回从上次计时器复位到当前经历的时间。
另外,程序中用到的避障函数为:
void random_avoid() { backward(); sleep(.4); if(random(2)==0) left(); else right(); sleep((float)random(100)/100.+.5);}void left_avoid() { backward(); sleep(.4); right(); sleep(.4);}void right_avoid() { backward(); sleep(.4); left(); sleep(.4);}参考:Fred G.Martin. 机器人探索:工程实践指南. 电子工业出版社. 2004