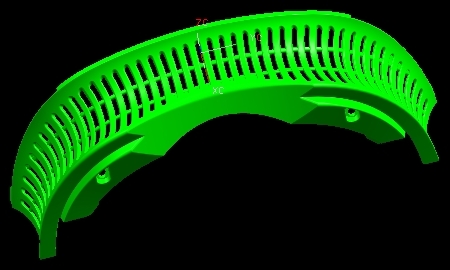
日立多賀掃除機的Cover盖板,面上的弧形孔位和侧面的安装孔结构决定模具在定模部分四面行位。
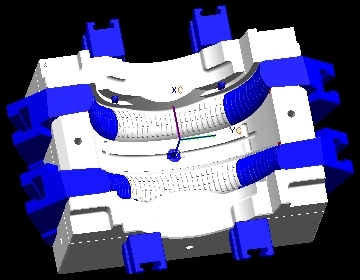
下图中白色为定模芯,蓝色为8个滑块。
用UG的“运动仿真”模块对开模过程中的滑块动作做简单的模拟。
定义连杆:
定模板、定模芯及其他连接在定模板上的附件一起定义为“连杆1”;顶板、斜紧楔、T型块、导柱、拉杆等一起定义为“连杆2”;XC、-XC、YC,-YC各方向的两个滑块各自定义为一组连杆。
定义运动副:
“连杆1”定义为固定,运动驱动为“恒定的”,速度为“35”;“连杆2”定义为沿ZC向的滑动副;XC、-XC、YC,-YC各方向的各组连杆与“连杆1”分别以各自坐标为方向定义为滑动副;XC、-XC、YC,-YC各方向的各组连杆与“连杆2”分别以各T型块滑动方向定义为滑动副。
下图为运动模拟。
下图为运动关键部件(滑块、T型块、斜紧楔)。